June 19, 2020
Sols 2799-2800: We've Gone About as Far (Up 'Bloodstone Hill') as We Can Go
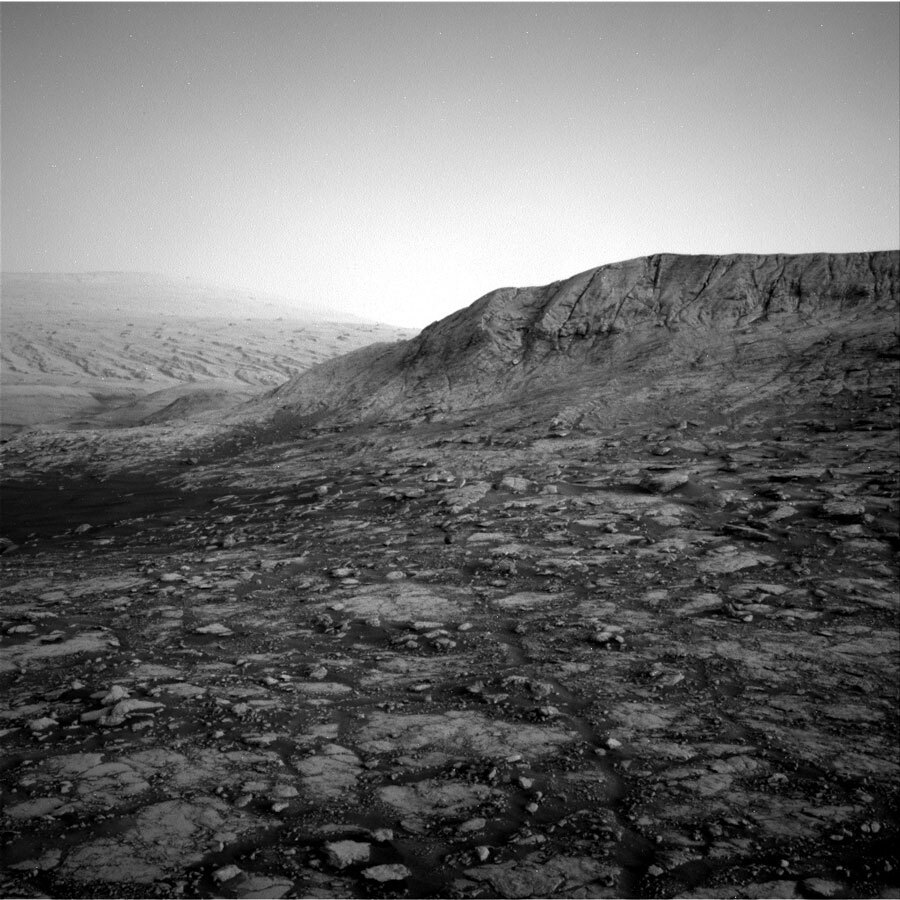
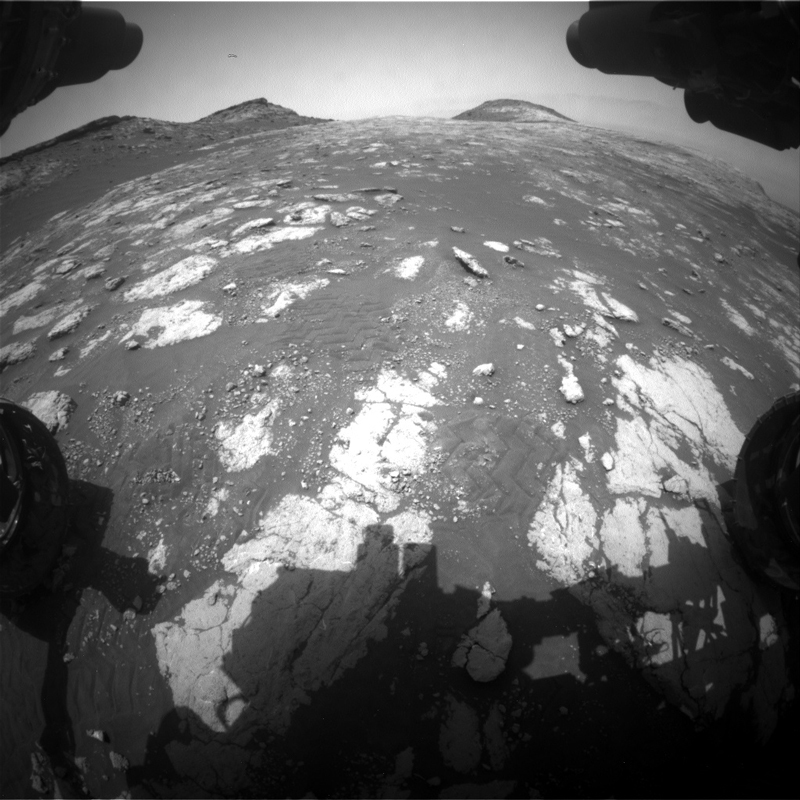
This image was taken by Left Navigation Camera onboard NASA's Mars rover Curiosity on Sol 2797. Credits: NASA/JPL-Caltech. Download image ›
Wednesday’s planned drive up "Bloodstone Hill" ended a little earlier than we’d anticipated because the slopes became too steep and slippery for our intrepid rover to ascend. As we were nearing the end of the planned drive, software onboard Curiosity detected the rover was making very little forward progress, so the computer told Curiosity to stop early and await further instruction from the team back on Earth.
All of this made for a fun and interesting day for me because I was staffed as “surface properties scientist.” In this role, I use my geologist background to provide input about the terrain properties to the rover drivers as we plan Curiosity’s drives. Although the rover’s maximum tilt was only 27˚ when the software ended Wednesday’s planned drive (our record is ~31˚), the rover drivers and I decided we probably wouldn’t make it much higher up Bloodstone Hill given the properties of the terrain and geometry of the potential paths forward. Instead, we decided our best option would be to do contact science near our current location. We’ll still need to adjust ourselves a bit in today’s plan to confirm the rover is stable enough for us to unstow the arm.

Despite not making it to the exact spot we’d hoped, the views today are still specular (The horizon isn’t tilted, we are!). We’ll spend the first sol of the weekend plan collecting remote information before repositioning to set us up for Monday. Today reminded me there is never a dull day of operating a rover on Mars!