August 4, 2017
Sol 1777: Easing back into mission planning

Today marked the last chance for us to reliably command Curiosity before she, and Mars, disappear behind the Sun for about three weeks. This made today's planning feel as if the Sun were setting on our normally active rover activities, akin to this Martian sunset image from 2015. MAHLI, APXS and ChemCam were already stored safely for the upcoming conjunction nap, leaving Mastcam and MARDI to collect a few last bits of science data for the GEO group. Mastcam acquired mosaics of the "Vera Rubin Ridge" above and in front of the rover, and of the workspace in front of the rover. Both mosaics not only inform us about the rocks around us, they will be used to plan activities right after we return from conjunction. Mastcam and MARDI will acquire images on sols 1757 and 1758 to look for wind-induced changes in the sands around the rover. These change detection images complement similar change detection images acquired at previous sand stops, revealing the dynamic nature of Mars. After imaging on Sol 1758, Mastcam will home her focus mechanisms and settle in for a well-deserved break.
The ENV group had a jam packed plan, acquiring three long Navcam movies seeking dust devils, and Mastcam and Navcam images monitoring the sky for clouds and dust load. The relative lack of other activities in the plan allowed these activities to be spaced out over early morning, mid-day and late afternoon times, giving the science team insight into how time of day influences atmospheric phenomena. DAN will acquire six long (at least one hour) passive observations, and RAD and REMS will continue their steady monitoring of the Gale Crater environment. DAN, RAD and REMS are the only three science instruments that will remain active over conjunction.
In addition to squeezing in science observations, Curiosity will conduct a suite of tests with the drill, another step in the efforts of the engineers to bring the drill back to full functionality. These tests will give the engineers just as much data to chew on over conjunction as the science team!
See you on the flip side, trusty rover!
Planetary scientists take their vacations when the planets align. In our case it is because communications with Mars are blacked out when the red planet goes behind the sun. It is called a solar conjunction. Afterwards, Mars will re-appear in our terrestrial skies early in the morning, just before sunrise. As the Earth chases the Red Planet, Mars will rise earlier until at opposition, when the Earth passes Mars a little over a year from now, the Red Planet will be directly overhead at midnight, e.g., directly behind Earth, relative to the sun.
For the Curiosity rover team, we will cease operations this weekend. There is one more day, tomorrow, for some instruments, while others like arm instruments and ChemCam cut out early, as we want to verify it is sun safe (its focus stage parked at a safe position) before we leave the rover on its own. The team will check on the rover on August 4 and re-start full operations on August 7. In the meantime, Curiosity might just get lonely.
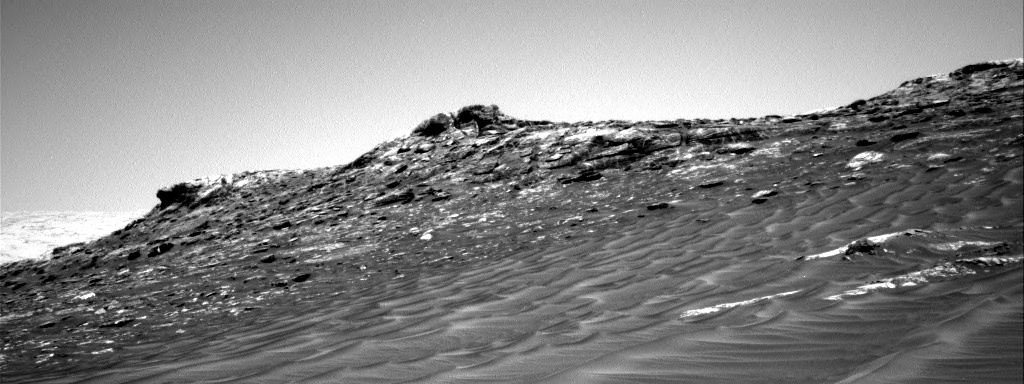
Yestersol's drive was 38 meters, bringing the mission total to just over 17 km. The rover is now facing a steep 20 meter high section of the ridge. The image link shows the front Hazcam view looking straight up the ridge. We won't climb it here; there's a gentler slope to the east.
Today it was decided not to drive any further before conjunction. The rover is on a ~8 degree slope right now and the team didn't want to risk a lot of slip just before conjunction. The team planned the last ChemCams pre-conjunction, with targets "Jimmies Ledge" and "Jennys Nubble." Mastcam will take a 2-image mosaic of the top portion of the ridge and provide documentation of yestersol's ChemCam AEGIS observation. Navcam will be used to make a dust devil movie and a suprahorizon movie looking south.
Today on Mars we planned a typical "drive sol" that involved a bit of pre-drive science followed by a drive and some post-drive untargeted observations. There were a variety of light and dark colored veins near the rover that were visible in the Navcam images, so the science team decided to spend our pre-drive science time investigating the chemistry and morphology of these features. The coordinated ChemCam and Mastcam observations we planned on light and dark veins in targets named "Hockomock Bay" and "Hells Half Acre" should get the job done. We'll also take a Mastcam-only observation of dark layers in a target named "High Sheriff."
The next major chunk of time in Sol 1754 will be spent driving towards Vera Rubin Ridge. Today I was staffed as a surface properties scientist, which means I helped advise the rover drivers on any geologic features in the terrain that could present mobility challenges. We'll be driving through a bunch of fractured bedrock and sandy areas as we head closer to our third official Vera Rubin Ridge approach imaging location. Because we've seen such spectacular sedimentary structures in our previous images of the ridge, we decided to try to get as close as possible to the vertical exposures of the lower portion of the Vera Rubin Ridge for this imaging stop - I can't wait until we get there.
Image of the day:
https://mars.nasa.gov/msl/multimedia/raw/?rawid=NRB_553120980EDR_F0642442NCAM00312M_&s=1753
A previous MAHLI end of drive stowed image:
https://mars.nasa.gov/msl/multimedia/raw/?rawid=1739MH0003250050700186E02_DXXX&s=1739
The activities planned for Sol 1753 revolve around a quick "touch-and-go" chemistry measurement using the Alpha Particle X-Ray Spectrometer (APXS) instrument on Curiosity's arm. After a ~10 meter drive while most Americans were asleep, Curiosity parked herself in front of another suite of beautifully fractured bedrock belonging to the Murray formation. The rover will begin her morning activities at approximately 9:30pm PDT, and about an hour later will conduct the short APXS measurement and high-resolution MAHLI imaging on a smooth block of the Murray formation known as "Foxbird." Later, the ChemCam instrument will collect chemistry information of Foxbird by ablating five small spots in the target using laser induced breakdown spectroscopy (LIBS) and recording the spectral properties of the generated plasma to determine the chemistry of the target. An additional Murray bedrock target known as "Damariscotta" will be targeted in three locations using ChemCam. The Damariscotta target exhibits beautiful thin layers along its edge, which is the target of this ChemCam investigation. Before driving further east along the nominal Mount Sharp Ascent Route (MSAR), Mastcam will be used to document both Foxbird and Damariscotta in color.
Following a planned drive lasting approximately one hour scheduled to begin at approximately 1:00am PDT, Curiosity will snap some Navcam images of her immediate surroundings before beaming them back to Earth via the Mars Reconnaissance Orbiter spacecraft. After phoning home, Curiosity will then complete her Navcam imaging, will acquire Mastcam images of nearby rock clasts and MARDI images of the terrain immediately beneath the rover, and will conduct a relatively short hunt for dust devils using Navcam.
The second ChemCam target in this plan is named for Damariscotta, Maine, a small coastal town plagued by violent conflicts and skirmishes during the 1600s and 1700s. Damariscotta is home to Whaleback Shell Midden, a huge heap of oyster shells that were discarded by the native populations well before the arrival of Europeans to the region. Digging through this midden reveals layer after layer of loosely consolidated shells that are now incorporated into the local geologic record. Might we one day find a shell midden along the margin of the ancient lake that once filled Gale Crater? Wishful thinking, methinks, but you can count on Curiosity to keep her eyes peeled.
Following a jam-packed weekend of contact and remote science on some beautiful sand deposits, the GEO group opted for mostly remote observations in today's plan. ChemCam will target "Grogg Ledge," a small patch of Murray bedrock in front of the rover. ChemCam will also use its Remote Micro-Imager (RMI) to take a long-distance mosaic of an interesting portion of Vera Rubin Ridge.
After our ChemCam activities, we'll take a suite of Mastcam mosaics to finalize our coverage of the sand deposits that we looked at over the weekend. We'll then drive, take some post-drive images, and perform a post-drive AEGIS observation. Later in the afternoon, we will conduct a SAM Electrical Baseline Test (EBT), which is designed to periodically monitor SAM's electrical functions. We also have a series of ENV activities for today, including standard REMS and DAN during the day, and an early morning suite for tomorrow that includes a Mastcam tau, line-of-sight extinction, and Navcam zenith and suprahorizon movies.
Today my job was the GEO group's Keeper of the Plan (KOP), which is a really exciting and rewarding operational role. As the KOP, I'm responsible for building the activities that GEO would like Curiosity to execute for the day. This involves assessing the terrain around the rover, searching for targets, and selecting observations that will help us achieve our scientific objectives. These tasks require input from all instrument teams and can sometimes get pretty busy!
Curiosity has intentionally scuffed a nearby sand ripple, which has gifted the team with an exceptional view of the interior of these small sand deposits. The majority of the weekend's activities will consist of lots of targeted science on the scuff, as there is no nearby bedrock for Curiosity to observe. This is in contrast to the past week where quick documentation of local changes in stratigraphy of the bedrock as we drive closer to Vera Rubin Ridge was the priority.
Several targets were selected for observations around the scuff including the undisturbed ripple crest that is grayer with coarse grains, "Enchanted Island," the undisturbed ripple side that is redder and finer-grained, "Thomas Little Toes," and the wall of the scuff that cuts through the ripple, "Ile Damour." These targets will be imaged by MAHLI, with particular focus on imaging the wall of the scuff to detect any layering within the interior of the ripple that has been uncovered. APXS will perform extended integrations on Thomas Little Toes and Enchanted Island. Unfortunately, an APXS integration will not be performed on Ile Damour, and MAHLI will remain 5 cm away from this target to ensure safety of the instruments by not bringing the arm too close to the ripple at the risk of the side of the ripple collapsing. Mastcam will also image these areas for comparison of grain size, color, and composition to previously observed ripples. Finally, ChemCam will target Enchanted Island for comparison to two other ripple crest targets and Ile Damour to detect differences in grain size and composition in comparison to the targets on the ripple surface.
Two other areas along and near the crest of the un-scuffed ripple will be targeted by Mastcam and ChemCam. "Verona" is slightly away from the crest of the ripple, and "Merrymeeting Bay" is at the base of the ripple crest. These two additional targets were selected to compare differences in grain size and composition and detect changes in color across the surface of the ripple. An interesting wrinkle in planning was ordering the observations so that ChemCam activities on the wall of the scuff (the Ile Damour target) occurred after any imaging from MAHLI, in case actively shooting the fragile wall side disturbed or shifted the sand along the scuff wall.
Before the science activities with the arm, Curiosity will take a rather unusual selfie of sorts by pointing MAHLI directly into the eye of Mastcam to look at the Mastcam sunshade. This measurement is being taken to ensure that grains of sand are not interfering with Mastcam tau measurements.
Finally, Curiosity will drive away from the sand ripple to make some progress towards the next stop in the Vera Rubin Ridge imaging campaign before conjunction. Mastcam and Navcam will take standard post-drive imaging.
As ESTLK, I ensured that ENV also took a bevy of observations over the weekend. Navcam will take four observations for ENV. First, two different dust devil surveys will be taken to attempt to observe any nearby convective vortices. One of these surveys will take three consecutive images at each of three aims 120 degrees apart to capture a 360 degree field of view. A second 4-frame dust devil survey will take a pair of images at four pointings, each about 40 degrees apart. Second, a line-of-sight measurement directed towards the crater rim will be captured that is similar to the Mastcam LOS to allow for comparison between instruments. Third, a supra-horizon cloud movie will be taken, which is particularly important as we move into the time of year of the aphelion cloud belt, where high-level clouds become much more frequent. Mastcam will capture tau and LOS measurements to assess the amount of dust in the atmosphere. REMS will fit in 20 extended, hour-long blocks, including two HRIM (High Resolution Interval Mode for humid measurements) measurements, and DAN will take the usual passive and post-drive active measurements.
Another touch-and-go was strategically planned for today, and there is bedrock in the arm workspace, so the tactical science team selected a block named "Tupper Ledge" for contact science. After APXS measures the elemental chemistry of Tupper Ledge and MAHLI takes a full suite of images of the same target, the arm will be stowed to allow ChemCam and Right Mastcam observations of a soil target called "No Mans Land" and a bedrock target dubbed "Sugar Loaves." Navcam will search for clouds above the horizon and the Right Mastcam will snap a couple pictures of "Harris," a trough in the dark sand.
Today's drive goal is to place the crest of a sand ripple in the arm workspace, to allow contact science on the ripple this weekend. A wheel scuff of the ripple was added by the Rover Planners, which should allow the interior of the ripple to be observed. After the drive and standard post-drive imaging, Navcam will search for clouds overhead and DAN will make another active measurement of hydrogen in the near-subsurface. Once again, the tactical team did a great job, so it was an easy day for me as SOWG Chair.
As is typical for Curiosity lately, today we planned a "touch-and-go" suite of activities for the rover. Today I served as the Science Operations Working Group Chair. A high level of charge in Curiosity's batteries after the long holiday weekend allowed us to prepare a bounty of science observations. The first activity was contact science, a mix of APXS and MAHLI, on a target named "Appledore" which is believed to be Murray bedrock much like we've examined before. This was followed by a Navcam survey for dust devils on the slopes of Mt. Sharp and then ChemCam targets on "Sugar_Plum" and "Whortleberry", the later of which appears to be a dark-toned pebble mixed into the light-toned Murray bedrock. We additionally scheduled a ChemCam passive observation, i.e., one without using the laser to vaporize small bits of rock, on a promontory of Vera Rubin Ridge (the taller point near the center of the image). We also targeted some interesting layered structures with Mastcam at the "Gooseberry" target.
Following this full plate of science activities, Curiosity will drive about 10 meters toward a sand ripple that we plan to study over the coming weekend. This may be the last sand dune field Curiosity can closely examine for a long while, so we plan to make the most of it!
I was the Surface Properties Scientist, or SPS, on staff again today. After completing a successful drive, Curiosity arrived at a nice workspace to carry out the weekend plan. Today's planning activities were for a three sol plan, where the weekend activities were scheduled, including several arm activities and a drive for the last sol of the plan.
The two arm activities included the targets "Mingo" and "Jobbies", each of which were located on Murray bedrock exposures. The Mingo target was chosen for a DRT because of its relatively smooth nature, making it suitable to brush the ever-present Martian dust away. The Jobbies target seemed to have a darker, gray toned appearance that intrigued the science team on shift today. Supporting remote sensing science was planned of the scene and will be used to both give context to the contact science and help continue finding a path up the Vera Rubin Ridge.
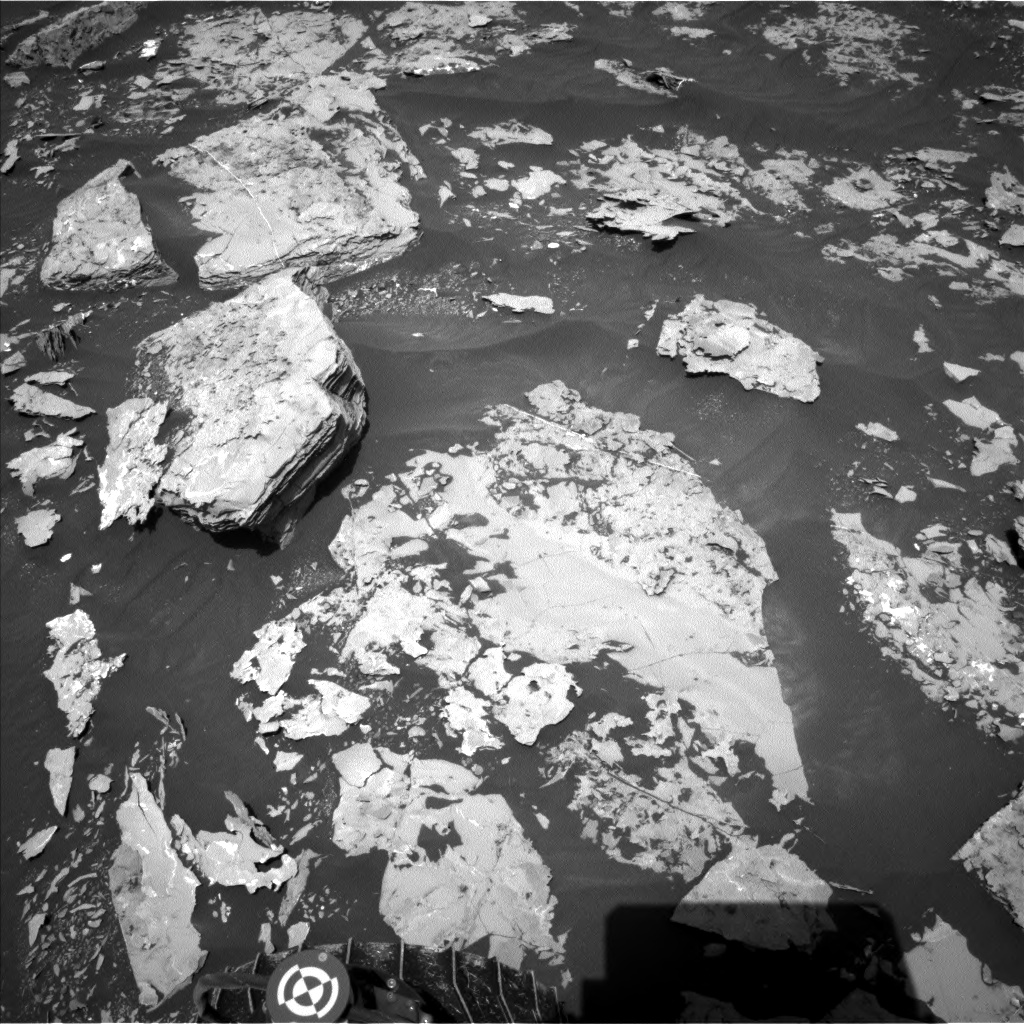
As SPS, today I worked with rover planners to help identify a clear path up the Vera Rubin Ridge, avoiding large, steeply dipping rocks to the left of the rover and dodging a big sand trap to the right of the rover. These features can be seen in the Navcam image shown, where the rover will drive just to right of the layered rock on the upper left side of the image. It turns out the best path forward was to put the rover wheels on either side and drive right over the top of a rock that was about 33 cm in height! This lone rock can be seen on the middle left hand side of the included Navcam image. This rock is no problem for Curiosity since it has plenty of clearance and will drive smoothly over this obstacle.
{kind=link}
{kind=link}
{kind=link}